Introduction
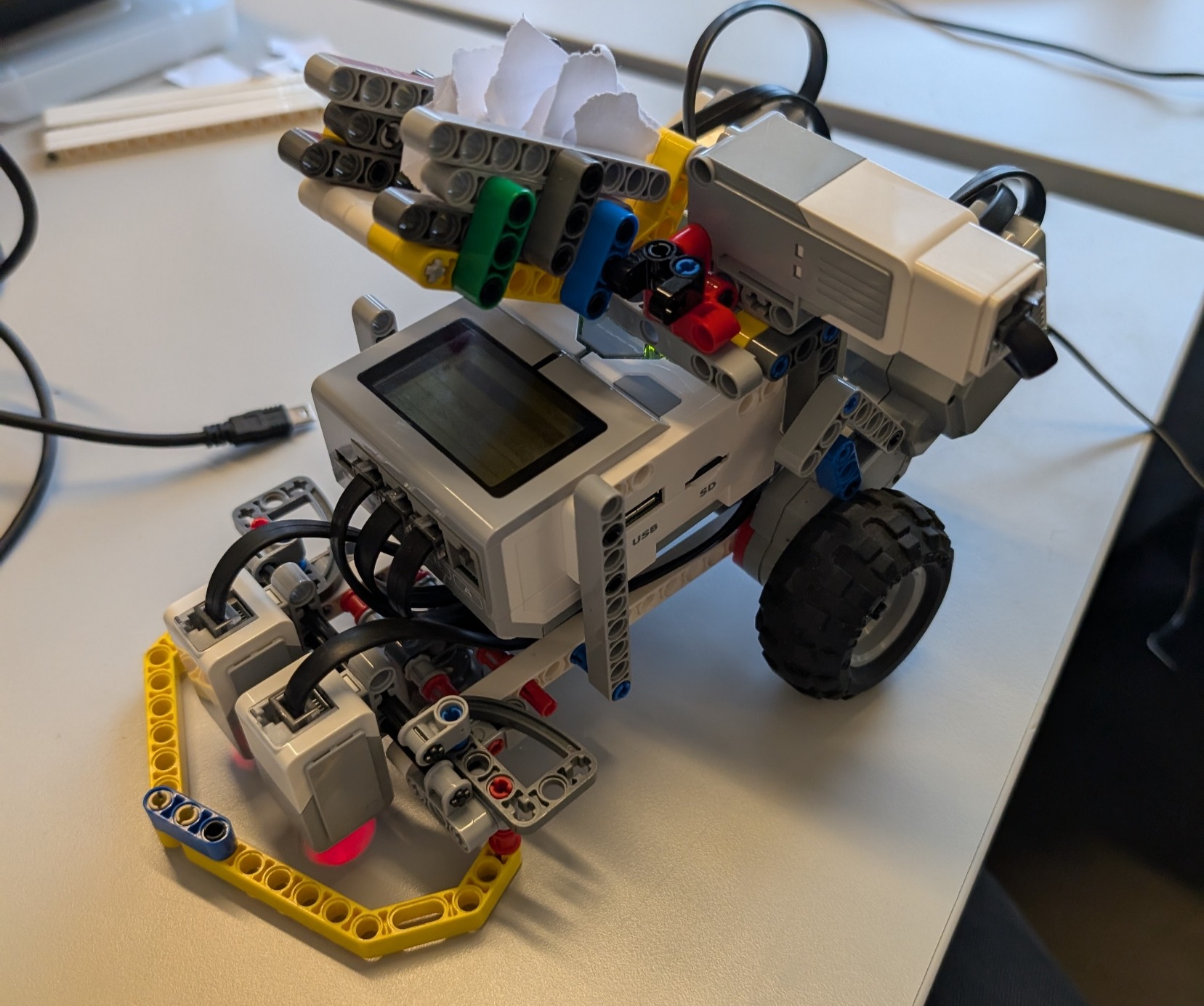
This was a team project where four of us built an autonomous line-following robot for the IDI-rally competition. The robot used two light reflectance sensors to detect and follow a black line on the track.
Technical Implementation
We initially attempted to implement a full PID controller for smooth line following, but after struggling with the complexity for several weeks, we decided to simplify our approach. We switched to a PD controller (dropping the integral component), which turned out to be much more effective for our specific use case.
The robot was programmed in Python and built using LEGO Mindstorms components. The control algorithm processed input from the light sensors to adjust motor speeds and keep the robot centered on the line.
Team Collaboration
Working in a team of four taught us the importance of leveraging different skill sets. Each member contributed their strengths, whether in mechanical design, programming logic, or problem-solving. The project highlighted how collaborative decision-making, especially knowing when to pivot from a complex solution to a simpler one, can lead to better results.
Results
Despite last-minute reliability issues, our robot won the IDI-rally competition. The simplified PD controller proved to be faster and more consistent than our original complex approach.
AI Notice: Translated from Norwegian using ChatGPT 5
Technologies: Python, LEGO Mindstorms, light reflectance sensors, PD control