Introduction
This was a team project where four of us built a mechanical device to make recycling more fun. We called it the Trashblaster 5000. The goal was to make a machine that shoots trash into the correct bin, turning waste sorting into a game.
Technical Implementation
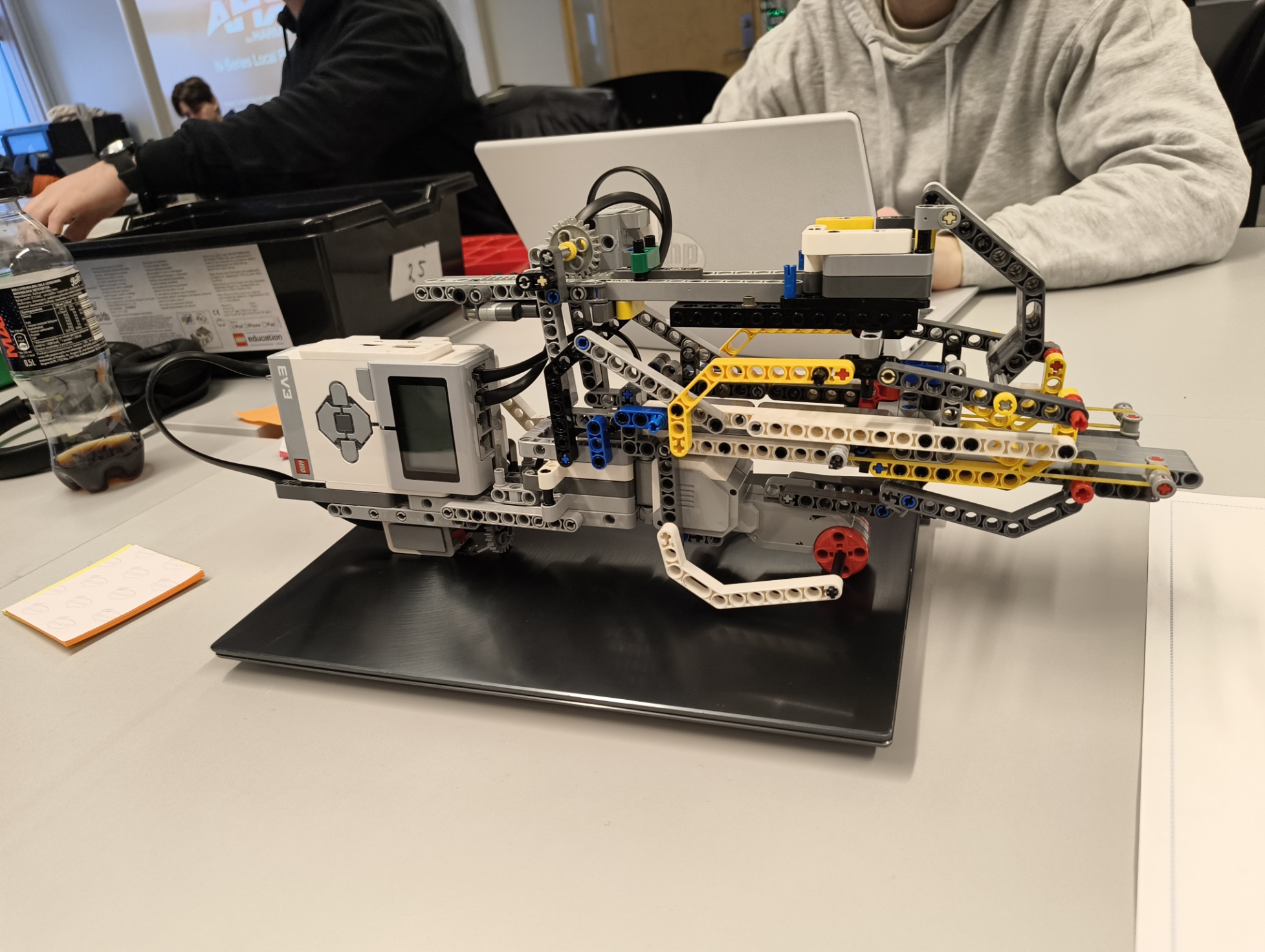
We initially wanted to build an automatic turret that could aim and shoot by itself. We tried to use a shooting mechanism with two wheels spinning in opposite directions, but it was too weak and used too many motor ports on the EV3 brick. We also had trouble making the Bluetooth connection work between the robot and our laptops.
Because of these problems, we decided to change the project. We built a handheld rifle instead. We changed the shooting mechanism to use rubber bands, which was much more reliable. The final result is a fully automatic rifle where you hold the trigger to shoot and reload continuously.
Team Collaboration
We started the project by looking at what we could do better from our previous projects. We agreed to be stricter with meeting times and to share tasks so everyone could learn new things. We had weekly meetings to check our progress and solve problems together.
We learned that it is important to be flexible. When the technical parts were too difficult or did not work, we worked together to find a new solution that was simpler but still worked well.
Results
The project ended with a working prototype that we are proud of. Even though it was different from what we planned at the start, the Trashblaster 5000 works well and makes recycling fun. It shows that a simple solution often works better than a complex one.
Video Demonstration
Technologies: Python, LEGO Mindstorms, Mechanical Engineering